The Oca Lab conducts research in engineering education with a focus on robotics and the integration of ethics through case-based design. The lab examines how students learn to design, build, and reason about robotic systems while engaging with complex, real-world ethical challenges. Through the development and study of case-based curricula, the Oca Lab investigates how authentic design scenarios can deepen technical understanding, strengthen ethical decision-making, and foster reflective practice. Its work aims to prepare engineers who are both technically skilled in robotics and committed to responsible, human-centered innovation.

The Oca Lab investigates human robot interaction with a particular focus on trust and safety in collaborative and real-world environments. The lab studies how people perceive, understand, and rely on robotic systems, and how design choices influence user confidence, risk awareness, and responsible use. Through empirical research and experimental design, the Oca Lab seeks to develop interaction frameworks that promote transparency, reliability, and ethical deployment. Its work advances the creation of robotic systems that are not only technically capable, but also trustworthy and safe partners in human-centered settings.

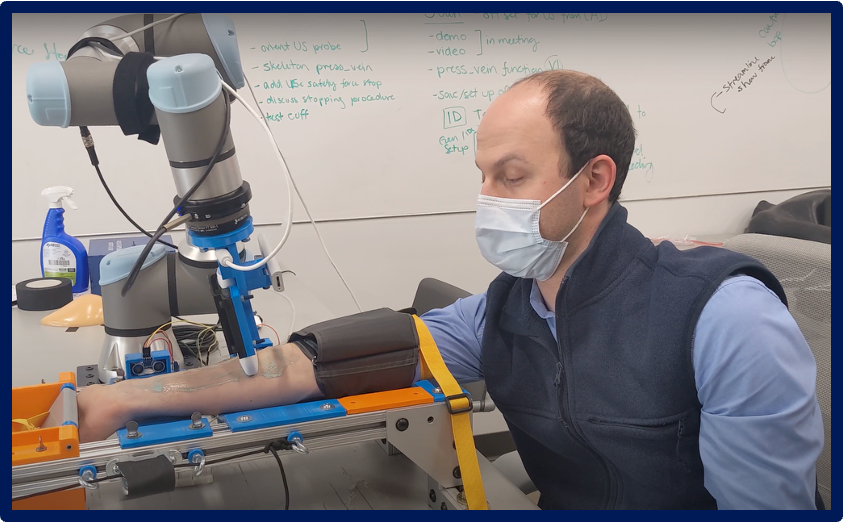
The Oca Lab conducts research in medical robotics with an emphasis on translational end effector design for clinical procedures, human–robot interaction, and enabling technologies for autonomous care. The lab develops and evaluates novel end effectors that bridge engineering innovation and practical clinical application, ensuring safety, precision, and usability in real-world settings. In parallel, it advances research in human–robot interaction to support effective collaboration between clinicians and robotic systems. The lab also designs and validates synthetic tissue models to support the development and testing of autonomous robotic ultrasound, accelerating safe translation from laboratory research to bedside implementation.
Open-Source Experimental Design for Assessing Surgical Knot-Tying Skill with Computer Vision
Sarah Glomski, Cameron Reid